北京众合航讯科技有限公司
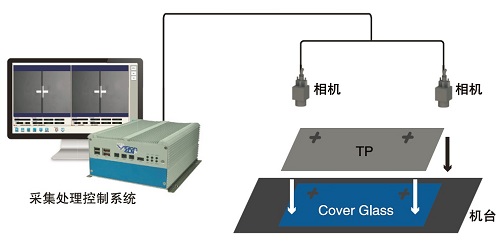
通过视觉定位系统,定位出玻璃盖板的mark点的坐标,再计算出整个玻璃盖板的XY坐标和角度偏移量。再发生信号给机械手做出矫正与贴合动作。
测量出工件的三维坐标,指引机器人进行取放作业
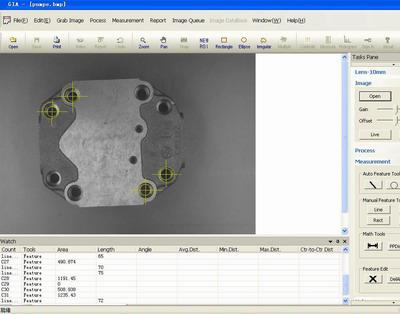
针对不同的样品,我们可以开发出客制化的工件定位软件。
通过视觉定位,引导机械手抓取移动的工件。

 扫一扫,了解详情
扫一扫,了解详情